GeoBot
Segment Detection
The low level visual processing of GeoBot is based on a very fast segment detector with color information. It has been developed by Pedro E. López-de-Teruel as part of its PhD thesis. The software is available on-line. The algorithm is described in López-de-Teruel et al. (2003), “Real-time extraction of colored segments for robot visual navigation”, ICVS 2003, LNCS 2626, pp. 428-437.
Lines are projective invariants. In structured environments line segments with color information are convenient features to capture all the relevant information in the images.
The algorithm is optimized to allow for real time processing (it uses IPL). In images with moderate clutter a typical computer can easily process 288 x 384 frames at 20Hz:
MPEG (1.3M) video sequence of Pedro's office (~15 fps for PAL/2 (288x384) images in a 500MHz Pentium III).
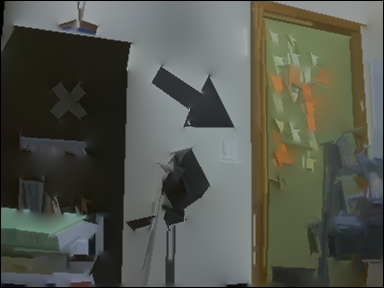
A good approximation to the original images can be reconstructed from the segments using a diffusion algorithm:
MPEG (1.1M) video sequence of the reconstruction (~20 seconds in 500MHz Pentium III).
Examples:
|
|
|
|
|---|---|---|
|
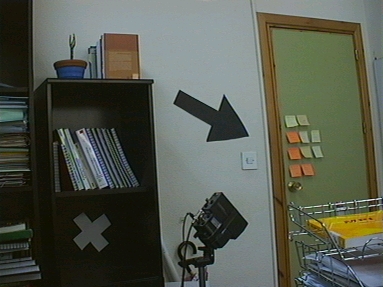
original image (288x384x3=324KB) |
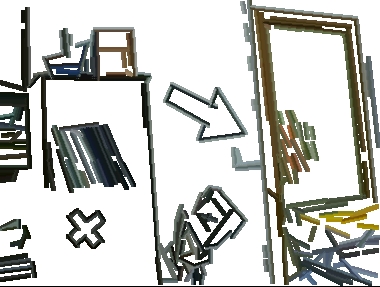
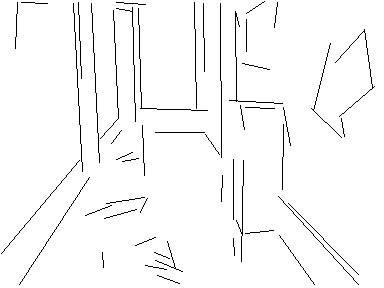
extracted segments with color information 264 segments, 2.64KB (ratio 0.8%). |
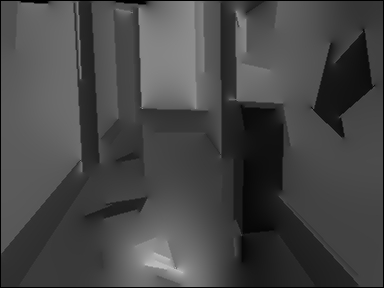
reconstructed image |
|
|
|
|
|---|---|---|
|
original robot navigation image |
segments detected |
reconstructed image |

Updated 19 January 2006