GeoBot (GEOmetric vision guided roBOT) is a mobile robot which builds structured 3D world representations in real time from visual information.
It has been developed as part of the PhD thesis of Pedro E. López-de-Teruel with support of the Spanish research grants Structural Perception in Real Time (TIC98-0559) and Visual Control of Walking Robots (DPI-2001-0469-C03-01). A short description of the system can be found in López-de-Teruel et al. (2006) “GeoBot: A High-Level Visual Perception Architecture for Autonomous Robots”, ICVS 2006. See also López de Teruel, et al. (2006). Efficient Monocular 3D Reconstruction from Segments for Visual Navigation in Structured Environments. ICPR-2006.
GeoBot is not reactive. Its behavior depends on abstract properties of the environment. The robot applies high level perception techniques to cope with the combinatorial explosion of possible interpretations.
GeoBot uses an efficient low level processing engine (see Segment Detection) which is able to extract in real time most of the large-scale geometric information from the images.
Currently the robot is monocular. Camera parameters are self-calibrated by taking advantage of odometric information. Following reasonable clues it can detect relevant planes in indoor environments. Then any visual feature can be reprojected back to 3D metric space with sufficient accuracy for navigation purposes.
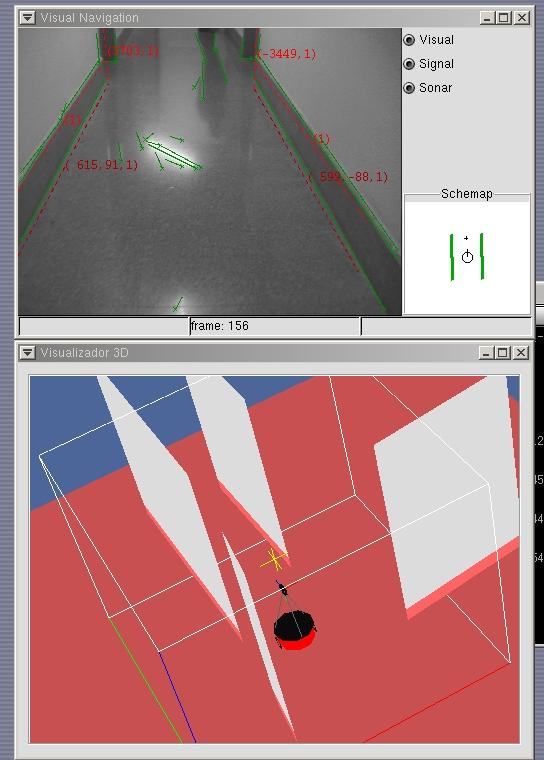
GeoBot maintains a 3D abstract model of the environment which is categorized into what we call schemaps (schematic maps). Its behavior depends on the state of the robot and the current relevant schemap detected. Navigation is not reactive; for instance it can take optimal paths to its target without being disturbed by irrelevant free or occupied regions of space.
It also perceives visual signs and locates them in 3D space. They are used as a simple communication language with the robot, to instruct it to take certain actions, avoid dangerous paths, etc. For instance, when an arrow of a certain kind is seen, GeoBot enters an appropriate asymptotic trajectory in the desired direction.
Indoor Robot Navigation
Geobot navigation using only visual information.
[MPEG
(5M) ]
Reconstructed environment from different viewpoints.
[MPEG
(3M) ]
Perception and Reconstruction of Structured Scenes
Video sequence of a corner with figures on the walls
(segments only).
[MPEG
(0.8M) ]
Video sequence of the same corner with the underlying b/w
image.
[MPEG
(0.5M) ]
Video sequence of the reconstruction from other
viewpoints.
[MPEG
(0.5M) ]
3D Reconstruction from a single image + interpretation
OpenGL reconstruction with texture mapping
 example
1 [MPEG (0.7M) ]
example
1 [MPEG (0.7M) ]
OpenGL reconstruction with texture mapping (example 2).
 example
2 [MPEG (0.7M) ]
example
2 [MPEG (0.7M) ]
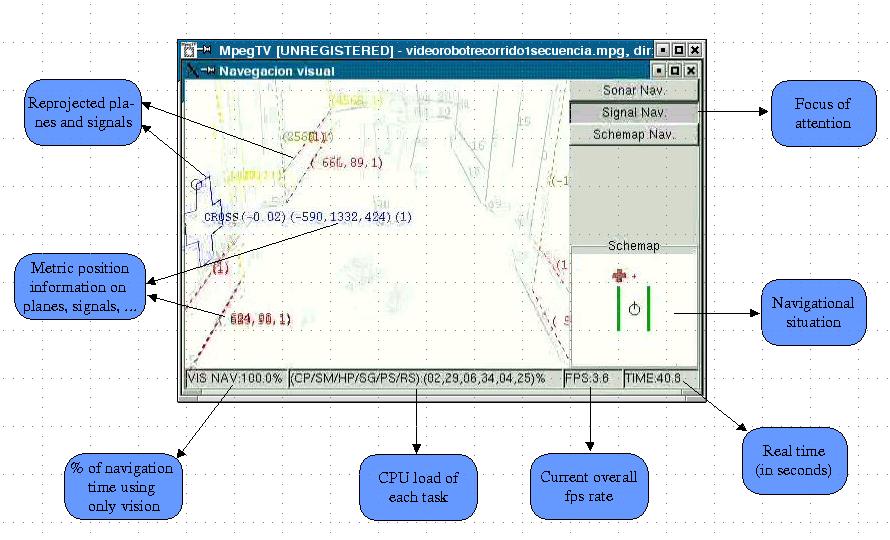
Explanation of the Display
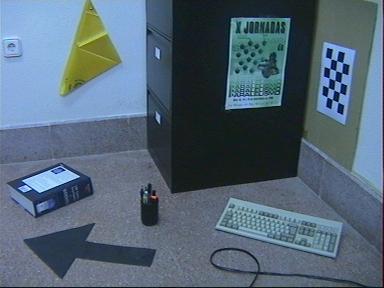
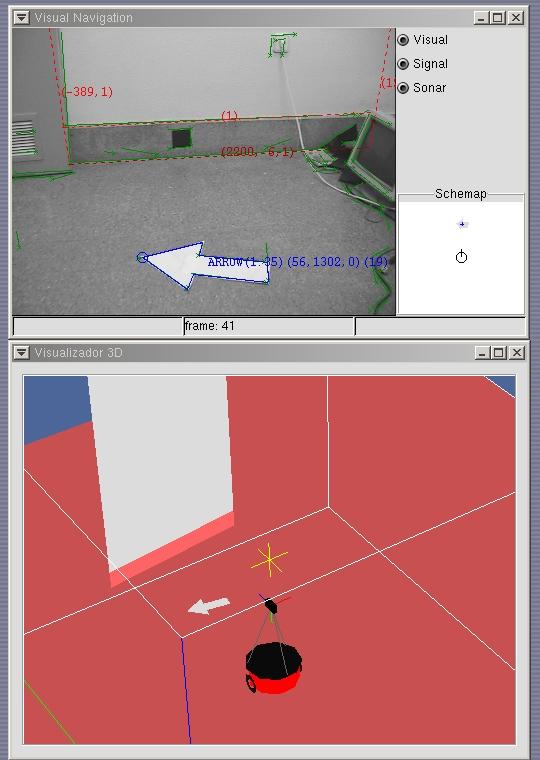
The robot recognizes an arrow and locates it in the 3D model:
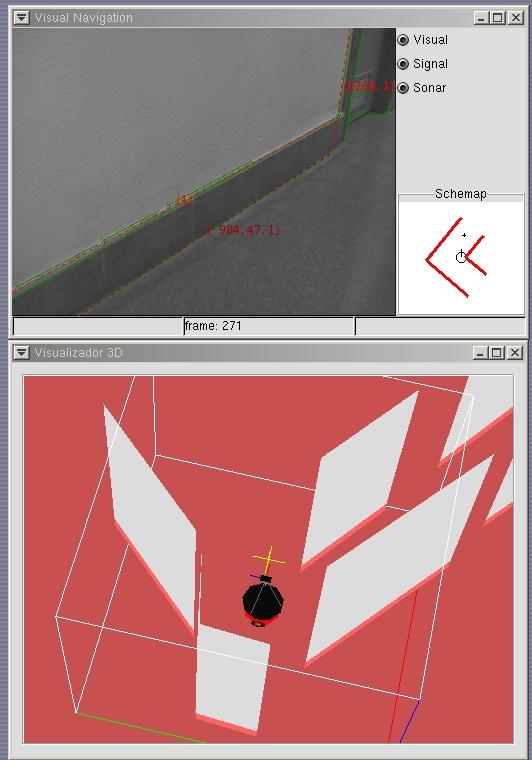
Navigation in a corridor:
Navigation in a corner: